1 引言
无线网络工程参数是网络运营维护的基准,每个本地网均有专人进行工参表的维护管理。但是,由于平时的网络优化、天气等其他因素均会导致工程参数的改变。因此,每年投入大量人力和物力逐站核查和校正。如果可以对
天线经纬度、站高、电子下倾角、机械下倾角和水平方向角等工程参数,进行远程实时获取和监控,对于夯实
无线网络运维和优化的基础数据,降低网络运维和优化难度,具有重要意义。
天线的远程管控软件实现均是依据国际标准组织AISG(Antenna Interface Standards Group)发布的标准。该组织在2006发布V2.0标准的同时,也基于网络运营需要发布了一系列扩展标准,其中包括工程参数的远程获取相关标准RAE(Remote eAntenna Extension)、ASD(Alignment Sensor Device)。为通过远程电调口进工程参数的准确获取,提供了软件实现基础。
2 网络运营需求
天线工程参数是网络维护和性能优化的基础参数,由人工进行维护和更新。然而,在现网天线安装和优化过程中,一方面,由于人为因素、仪器误差和自然气候等因素;另一方面,由于优化工作的常态性,优化后的天线工程参数由于更新不及时,将会导致实际天线工程参数与维护工程参数值之间存在一定的误差。
实际天线工程参数与维护工程参数值不一致,为网络优化带来诸多困难。一方面,基于错误的工程参数,易于造成网优工作中对问题分析的误判,即使耗费了不少人力和物力,但往往达不到预期效果,甚至存在优化调整后性能下降情况。如针对一个待优化区域仿真分析±3°下倾角误差,将使覆盖恶化4~6个百分点;另一方面,当暴雨和台风等特殊天气过程之后,网络需要在短时间内进行恢复,但天线实际工程参数根本无法第一时间内获取。如,现网中由于GPS通常是安装在机房内,对于RRU拉远和BBU集中等建设场景,经纬度信息与实际相差甚远,大大降低运营效率。因此,亟需通过电调口远程获取工程参数信息
3 技术方案
工程参数主要包括经纬度、海拔高度、水平方位角、机械倾角五个信息。为了通过远程获取工程参数信息,
基站设备、天线设备软件上一般基于AISG扩展协议RAE、ASD来实现。从硬件实现方案上对于六个基础工参中,经纬度/海拔高度、机械下倾角分别通过GPS、重力加速度传感器获取,而最难实现的是水平方位角。经过反复试验和创新研究,目前较成熟的是双GPS方案、和差波束方案、磁罗盘方案。
3.1 双GPS方案
利用GPS进行绝对定位时,精度受信号传播误差、时钟误差等因素影响。尽管其中的误差可以通过模型加以消除,但残差仍然存在。按照现在硬件成熟度静态绝对定位精度为米级,也正是大家通常认为的GPS定位不准的原因。在使用双GPS实现水平方位角高精度获取使用的是二次差分GPS定位,是目前GPS定位中精度较高的一种:
1) 一次差分
如图1所示:两台GPS接收机k、m同步观测相同卫星p,按照载波相位测算的基本原理,两个GPS接收机之间的相位差可以表示为:
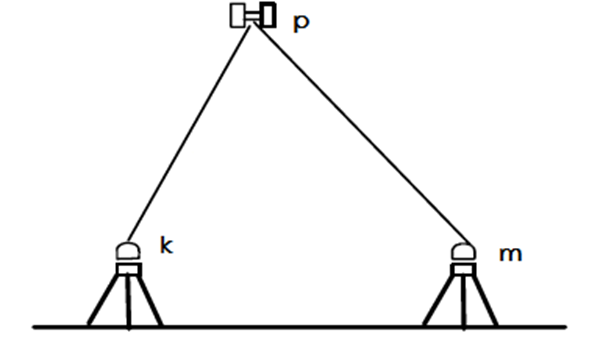 Figure 1. Structure diagram of absolute position of GPS
图1. GPS绝对定位结构图
Figure 1. Structure diagram of absolute position of GPS
图1. GPS绝对定位结构图
(1)
其中,公式(1)中

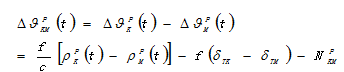
为接收机时钟相对于GPS时间的误差纠正数。N是由于多普勒的影响,导致存在的整周期模糊度。因此,显然经过一次差分仍然存在误差。
1) 二次差分
如图2所示:两台GPS接收机k、m同步观测两个卫星P、Q,按照载波相位测算的基本原理,针对每一个卫星均可以写出两个公式(1)的一次差分方程
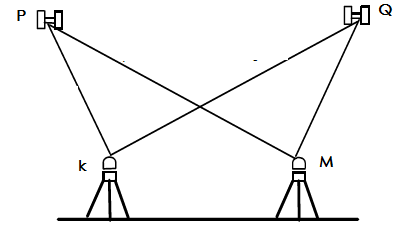 Figure 2. Structure diagram of dual GPS orientation
图2. 双GPS定位结构图
Figure 2. Structure diagram of dual GPS orientation
图2. 双GPS定位结构图
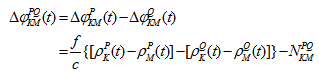
因此,使用一个GPS进行定位有一些无法消除的误差,在使用双GPS进行相对定位时使用二次差分能够消除更多误差。在进行水平方位角测量时,用两台GPS接收机分别安置在基线的两个端点,其位置静止不动,同步观测相同的4颗以上卫星。
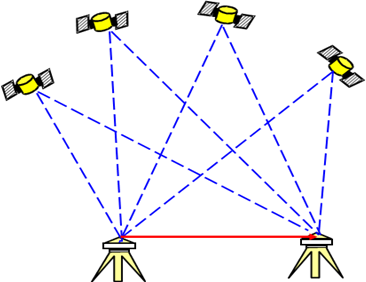 Figure 3. Structure diagram of Dual GPS orientation
图3. 双GPS定位结构图
Figure 3. Structure diagram of Dual GPS orientation
图3. 双GPS定位结构图
通过多组卫星二差方程构成方程组,解方程便可以求解两个GPS的矢量方向,通过坐标系转换,完成水平方向角定位。
3.2 和差波束方案
人造卫星具有空间位置持续移动并且轨道精确已知的特点,通过具有高度方向角度选择性的接收天线,就可以检测到任意一颗人造卫星通过接收天线特定方向的事件。由于人造卫星的俯仰角和方位角已知,可以计算出接收天线的方位角。而接收天线与基站天线的相对位置关系已知,便可以进一步计算出基站天线的方位角。
如图4所示
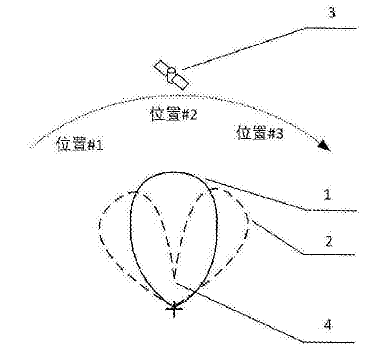 Figure 4. Sketches of sum and difference beams
图4. 和差波束示意图
Figure 4. Sketches of sum and difference beams
图4. 和差波束示意图
在基站天线位置布置用于产生和波束1及差波束2两种形式的波束接收天线单元,对人造卫星3的信号同时进行接收。由于和波束1及差波束2的方向图形状不同,对于同一颗卫星,两种波束的输出信号强度随卫星位置的不同而发生变化。通过比较两个波束的输出信号绝对强度和相对强度的变化,就可以判断出卫星是否正在通过差波束2的接收凹点4。参见图5所示
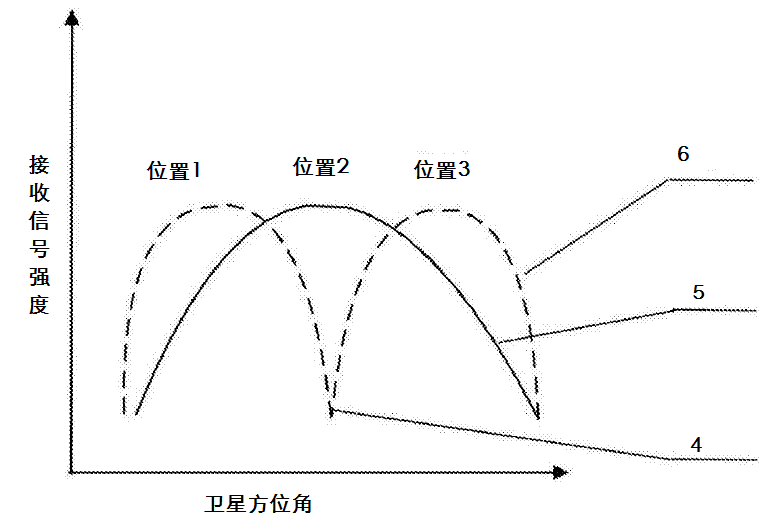 Figure 1. Curve of receiving signal
图1.接收信号曲线
Figure 1. Curve of receiving signal
图1.接收信号曲线
当卫星在空间移动时,和波束1的接收信号幅度曲线5,差波束2的接收信号幅度6。由于差波束2存在接收凹点4,当卫星通过接收凹点4的正前方时,和波束1、差波束2的输出信号幅度差别达到最大。同时卫星的轨道参数已知,所以卫星的方位角已知,差波束2的接收凹点4所面对的方向就是卫星的方位角。依次确定天线方位角。
3.3磁罗盘方案
磁罗盘方案是测向的基本方案,已经被广泛用在
智能手机中,通常施工时记录方位角的方法便是使用罗盘。远程工参感知进行方位角测量时,该方案包含两个重要传感器,一个是三轴重力加速度传感器、一个是三轴磁力计传感器。三轴加速度传感器测量地球重力的三轴加速度分量信息进行获取和计算,从而解算出天线的机械下倾角θ和横滚角φ。三轴磁力计传感器测量地球磁场的三轴磁力分量信息,通过获取和计算三轴磁力计分量信息,及前面已经解算出来的下倾角θ和横滚角φ,测得天线的磁北偏航角ψ。
该方案相比其它方案较简单,存在最大问题是电子罗盘容易受外界磁场干扰,尤其是站点环境比较复杂,比如电源噪声、周围铁质物体等的影响,导致测量到的方位角存在很大误差。但是,对于环境固定情况下,外界磁场对电子罗盘的影响是固定不变的。比如实际方位角为5°,经过电子罗盘测量到方案是15°。当天线姿态发生变化,实际方位角变化为20°,经过电子罗盘方案测量到角度为30°,即相对角度误差很低。
4 对比分析
针对双GPS方案、和差波束方案、磁罗盘方案在实际现网进行了对比
测试。
测试时通过在现网天线上安装相应方案硬件设备,利用AISG线缆连接到RRU的电调口,通过网管在后台进行工参信息读取,同时使用专业仪表进行基准值测量进行对比:
Table 1. Test resulting data of expriment
表1. 测试结果数据
|
方案评估 |
双GPS方案 |
和差波束方案 |
磁罗盘方案 |
|
测量精度 |
方位角
海拔高度
经纬度

机械倾角
 |
方位角
海拔高度

经纬度

机械倾角
 |
方位角
机械倾角
 |
|
定位时间 |
15分钟以内 |
10小时 |
5分钟以内 |
|
成本 |
偏高 |
居中 |
较低 |
|
缺点 |
感知模块上方无遮挡的视角范围应该》120° |
感知模块正前方45°不能有遮挡,定位时间较长 |
测量相对方位角精度校准,初始角度需要人工录入 |
基于本次测试结果来看,远程获取工参的双GPS方案、和差波束方案、磁罗盘方案在测量精度、定位时间、成本、缺点各有不同。基于网络实际应用场景诉求,可以选择相应方案。
在实际应用中,现网存在大量新增和存量天线,不同厂家天线结构完全不一样。如何适配安装在不同的天线,也是各种方案的关键。工参感知模块安装到天线上,首要保持与天线外罩平行,以便正确获取水平方位角。同时,模块需要固定在天线外罩,不能因为天气等原因,导致存在安全隐患。因此,工参感知模块结构件也是关键问题。
4 结束语
工程参数是网络运营维护的基准,本文针对远程获取工参的双GPS方案、和差波束方案、磁罗盘方案进行了深入探讨,在实际应用中,还有许多方面需要考虑和完善。
可以预见,工程参数远程获取将为
运营商形成一个巨大的数据库,为后续演进技术SON的引入,特别是更多更实用的自优化功能的引入与实施,甚至是提升定位业务的精确度等,都奠定了坚实的基础。
参考文献
[1] Scott D M。Azimuth Determination from GPS larriar phase Measurements[M],W930094
[2] AISG Version 2.0: “Control Interface for Antenna Line Devices”
[3] AISG Extension:Remote eAntenna Extension Standard No。AISG-ES-RAE v2.1.0
[4] AISG Extension:Alignment Sensor Device Standard No。AISG-ES-ASD v2.1.0
[5] 王广运等。差分GPS定位与应用[M],北京:电子工业出版社,1996
[6] 王勇军、李军、李翔。三轴电子罗盘的设计与误差矫正[J] 传感器与维系统。2010
作者简介
李艳芬,女,中国电信股份有限公司北京研究院网络技术与规划部工程师
罗钢,男,中国电信股份有限公司网络运行维护部高级工程师
齐飞,男,中国电信股份有限公司北京研究院网络技术与规划部工程师
朱雪田 男,中国电信股份有限公司北京研究院网络技术与规划部副部长






